Jeder Körper, der in Wasser eintaucht erfährt eine Auftriebskraft, die gleich der Gewichtskraft des verdrängten Wassers ist. Wenn also ein Körper 10kg Wasser (=10 Liter) verdrängt, so wirkt eine Auftriebskraft von 10 kg auf ihn. Das Wasser versucht quasi den eingedrungen Körper wieder aus sich heraus zu drücken.
Grundlagen
Jeder Körper, der in Wasser eintaucht erfährt eine Auftriebskraft, die gleich der Gewichtskraft des verdrängten Wassers ist. en Wenn also ein Körper 10kg Wasser (=10 Liter) verdrängt, so wirkt eine Auftriebskraft von 10 kg auf ihn. Das Wasser versucht quasi den eingedrungen Körper wieder aus sich heraus zu drücken. Fassen wir diese Feststellung wie folgt zusammen:
Ein auf einer Flüssigkeit schwimmender Körper sinkt so tief in die Flüssigkeit ein, dass die Gewichtskraft des Körpers und die Gewichtskraft der verdrängten Flüssigkeit gleich sind.
Daraus folgen drei verschieden Zustände:
- Wenn die Gewichtskraft eines Körpers grösser als die Auftriebskraft ist, so wird der Körper sinken.
- Wenn die Gewichtskraft eines Körpers gleich der Auftriebskraft ist, so wird der Körper in Schwebe sein.
- Wenn die Gewichtskraft eines Körpers kleiner als die Auftriebskraft ist, so wird der Körper steigen.
Ob ein Körper im Wasser nun sinkt, schwebt oder steigt errechnet sich auf einfache Weise über die Dichte. Die Dichte definiert sich als Quotient aus Körpermasse durch Körpervolumen:
ρ= Masse [kg] / Volumen [dm3]
- Wenn die Dichte kleiner als 1 ist, so wird ein Körper im Wasser steigen, bis das verdrängte Volumen gleich der Gewichtkraft des Körpers ist.
- Wenn die Dichte gleich 1 ist, so wird ein Körper vom Wasser in Schwebe gehalten.
- Wenn die Dichte grösser als 1 ist, so wird ein Körper im Wasser sinken.

Diesen Umstand nutzen in der Natur die Fische, indem sie ihr Lungenvolumen entsprechend ändern. In der Technik, verwenden insbesondere U-Boote oder Unterwasser-Roboter dieses Verhalten, um im Wasser entsprechend auf- und abwärts zu tauchen bzw. zu schweben.
Damit ein U-Boot überhaupt noch steuerbar wird - also sinken, schweben und steigen kann, gilt für die Bemessung folgende wichtige Regel:
Das Verhältnis der Gewichtskraft des U-Boots zum Volumen des U-Boots darf den Wert 1 nicht überschreiten!
Wenn Sie ein U-Boot bauen möchten, welches ein Volumen von 10 dm3 hat, so darf dieses U-Boot nicht schwerer als 10kg werden, ansonsten wird das U-Boot von vornherein nur sinken können. Das heisst, das Bruttogewicht eines U-Boot Körpers (inkl. Tauschtank, Elektronik, Batterien etc.) darf 10kg keinesfalls überschreiten! Im Gegenteil ist hier sogar etwas Reserve zu geben, damit der Tauchtank eines U-Bootes noch die Chance hat zu fluten.
Bemerkung: Im Fachjargon bedeutet "lenzen" das entleeren eines Tauchtanks und umgekehrt "fluten" das befüllen.
Modellbautechnik
Statisches Tauchen
Beim statischen tauchenverändert das U-Boot sein spezifische Gewichtdurch einen so genannten Tauchtank. Statisch tauchende Modelle haben typischerweise keine Tauchtanks und Regelzellen wie die Originale, da der Auwand in keinem Verhältnis wäre im Vergleich zu den Vorteilen. Im Modellbau wird üblicherweise meist ein Kolbentank verwendet. Andere Techniken wie z.B der Einsatz von medizinischen Beuteln mit Zahnrad und Ventil sind ebenfalls denkbar.
Im Fall des Kolbensystems wird die Körpermasse des U-Boots durch die Stellung des Kolbens verändert, welches wie eine Pumpe Wasser in den Tank zieht oder hinauspresst. Angetrieben wird der Kolben über einen übersetzten Elektromotor, welcher mit einer Schraubenwelle verbunden ist. Je nach Wassermenge im Tank ist die Gewichtkraft des U-Boot Körpers grösser, gleich oder kleiner der Gewichtkraft des verdrängten Körpervolumen - das U-Boot sinkt, schwebt oder steigt. Beim Anziehen von Wasser in den Kolbentank wird als Ausgleich Luft von der gegenüberliegenden Kolbenseite in den Druckkörper gedrückt. Das heisst, die verdrängte Luft durch den Kolben erhöht den Innendruck des Tauchkörpers (jedenfalls in einem geschlossenen Modell)! Eine kritische Tauchtiefe beim Kolbensystem ist deshalb spätestens bei 10m erreicht, da die Kolbendichtung dem Druck nicht mehr standhält bzw. der Kolben wegen des hohen Innendrucks im Druckkörper nicht mehr bewegt werden kann.

Dynmamisches Tauchen
Beim dynamischen Tauchen wird das Tiefenruder verstellt oder ist Bauseitig bereits mit einem Anstellwinkel fest montiert. Das Boot wird dabei durch Motorkraft so stark in Fahrt gebracht, dass bei einer bestimmten Geschwindigkeit und einem Anstellwinkel des Tiefenruders das Boot abtaucht (siehe auch "Dynamische Lageregelung"). Da die technische Umsetzung beim dynamischen Tauchen einfacher und kostengünstiger umsetzbar ist als beim statischen Tauchen, findet man oft solche Modelle als Bausätze. Trotz der technischen Einfachheit, ist bei einer Tauchtiefe von weniger als 10m die statische Lösung vorzuziehen, da es eine Realitätgetreue Nachahmung ermöglich und insbesondere ein Tauchen an Ort und Stelle zulässt.
Grössere Tauchtiefen können technisch nur noch nach dem dynamischen Prinzip erreicht werden, da die Abdichtung von Antrieb und Kolbentanks bei grösseren Tiefen sehr anspruchsvoll bis unmöglich werden. Bei RoV (Remote operated Vehicle) wird der Tauchkörper knapp in die Schwebe getrimmt. Den Auf- und Abtrieb erhält das RoV durch vertikal und horizontal angeordnete Thruster. Bei Thrusters handelt es sich quasi um Wasserschrauben, welche durch kontaktlose Motoren angetrieben werden und am Druck oder Tauchkörper angebracht sind. Je nach Schubrichtung erhält das RoV Auf- oder Abtrieb oder fährt in horizontaler Richtung.

Schwimmlage
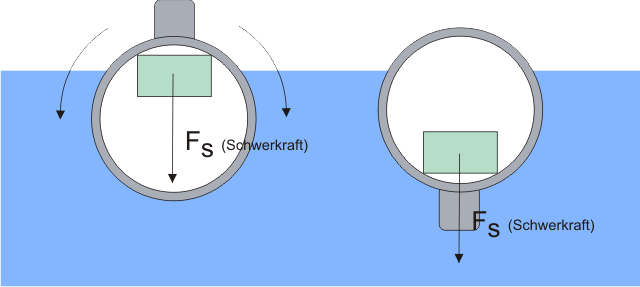
Das Verhalten eines U-Boots ist nicht nur vom spezifischen Gewicht abhängig. Ebenso wichtig ist eine stabile Schwimmlage, welche massgebend durch die Form und den Schwerpunkt des U-Boots beeinflusst wird. Je tiefer der Schwerpunkt des U-Boots, um so stabiler die Lage. Und je formtstabiler ein U-Boot, um so weniger wird das U-Boot kippen oder sich drehen. Die folgende Abbildung soll dies genauer illustrieren:
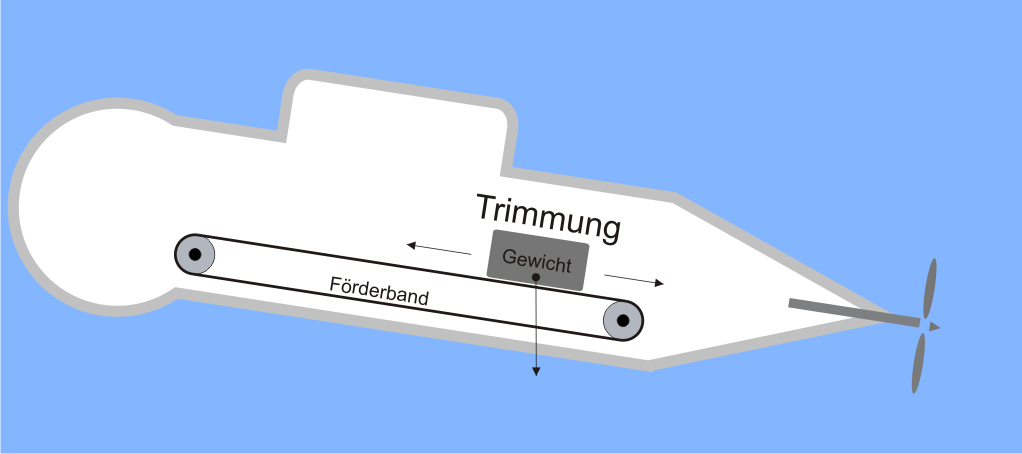
Trimmung (statische Lageregelung)
Die horizontale Lage ist massgeblich von der Form und vom Schwerpunkt des Schwimm- bzw. Druckkörpers abhängig. Bei der Konstruktion ist deshalb die Verteilung der einzelnen Komponenten innerhalb des Auftriebkörpers zu beachten. Zu viel Gewicht am vorderen Ende des U-Boot lässt z.B. den Körper schräg nach unten hängen und umgekehrt. In einem gewissen Bereich lässt sich diese Schieflage durch kleine Gewichte wie z.B. Blei ausgleichen (trimmen). Leider beeinflusst die Lage aber auch die Temperatur. Ein Modell U-Boot muss unter Umständen vor jeder Fahrt neu getrimmt werden! Erschwerend kommt hinzu, dass sich der Schwerpunkt durch das Lenzen des Tauchtanks ebenfalls verändern kann. Abhilfe schafft hier zum Beispiel eine elektromechanische Trimmung. Im unten stehenden Bild wird das Prinzip symbolisch durch ein Förderband dargestellt. Das Gewicht könnte zum Besipiel in der Praxis durch ein Schraubengestänge, welches mit einem kleinen Motor angetrieben wird, verschoben werden.
Ein weitere Variante die Lage des U-Boots unter Kontrolle zu halten bildet der Einsatz von zwei Kolbentanks. Die Kolbentanks sollten gegengleich angeordnet sein, so dass die Gewichtsverlagerung der einzelnen Kolben sowie das Wasser im Kolben sich gegenseitig ausgleichen. Ein Vorteil dieser Variante ist das individuelle regulieren der Lage. Beim Tauchgang z.B. kann das U-Boot bewusst in eine Schieflage nach vorn gebracht werden und umgekehrt beim Auftauchen. Die genannte Variante ist in Summe aber nur für länglich geformte Modelle praktikabel.

Die Lagebeeinflussung muss nicht zwingend im Innern eines Druckkörpers erfolgen. Genau so denkbar ist eine Trimmung in Form von Gewichten oder gar Schwimmkörpern ausserhalb des Druckkörpers. Schwimmkörper kommen immer dann zum Einsatz, wenn der Tauchkörper so schwer ist, dass er nur noch sinken würde. Als Nebeneffekt kann man solche Schwimmkörper natürlich auch zur Trimmung der Lage nutzen. Die Anforderungen an Schwimmkörper sind allerdings hoch, da wegen dem Tiefenfruck die Kompression den Schwimmkörper zerstören kann.
Dynamische Lage-Regelung
Bei der Lageregelung geht es darum das U-Boot möglichst in einer stabilen - üblicherweise horizontalen - Lage zu halten. Die Lage eines U-Boots lässt sich durch das Verstellen der Tifenruder beeinflussen. Da sich die Lage nur in Fahrt ändern lässt, spricht man auch von dynamsicher Lageregelung. Das dynamischen Tauchen kann übrigens mit der selben Methode erreicht werden (Mindestgeschwindigkeit vorausgesetzt). Die Lenkung der Lage ist mit einem Fluzeug vergleichbar - einzig das Medium ist Wasser anstatt Luft. Durch den Einsatz eines elektronischen Lagereglers lässt sich ein U-Boot beim Fahren in der horizontalen Lage halten.
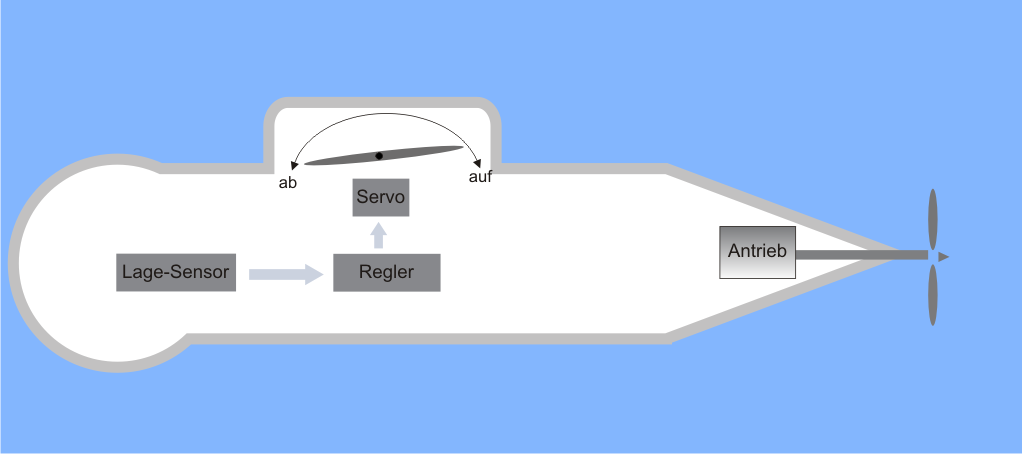
Moderne Sensoren (Lageregler) vermessen in einem sehr kleinen Hohlraum heisse, steigende Luft nach ihrer Lage und geben die Position (Ist-Wert) an den Lageregler weiter. Je nach Abweichung des Ist- zum Soll-Werts wirdder entsprechende Stellwert an den Servo weitergeleitet, welche das Tiefenruder ansteuert. Wer sich schon mit Regeltechnik beschäftigt hat, kennt die Tücken der Regeltechnik. Falsch eingestellte Parameter (Vertsärkung, Integral- sowie Differenzialanteil) können zu einem unerwünschten Schwingverhalten führen und ein U-Boot letztendlich wie ein Delphin schwimmen lassen.
Tiefen-Messung/Regelung
Ein U-Boot auf konstanter Tiefe zu halten ist nicht Leicht. Einerseits ist es praktisch unmöglich als Steuermann z.B. per Funkfernsteuerung die Tiefe unter Kontrolle zu halten, andererseits kann die Strömung oder Wellengang ein U-Boot nicht unwesentlich auf und ab treiben. Auch bezüglich Sicherheit ist die Tiefe von grosser Wichtigkeit, da der Druckkörper in der Regel nur bestimmte Tiefen aushält. Die Messung der Tiefe ist im Modellbau also unabdingbar und sei es nur, um das U-Boot zum Auftauchen zu zwingen sobald eine kritische Tiefe erreicht ist. Solche Messfühler gibt es auf dem Markt für unterschiedliche Druckbereiche und somit Tiefen. Damit habe ich das Geheimis bereits gelüftet, gemessen wird der Druck der Wassersäule unter Wasser. Der Druck ist praktisch linear zur Tiefe und kann somit leicht umgerechnet werden.
Aussendruck und Festigkeit
Vielen Leuten ist gar nicht bewusst, was für Kräfte unter Wasser auf ein U-Boot wirken! Unter Vernachlässigung der Meereshöhe hat der Luftruck an der Wasseroberfläche einen absoluten Druck von 1bar (wobei 1 bar = 100'000 Pascal oder 100'000 N/m2).
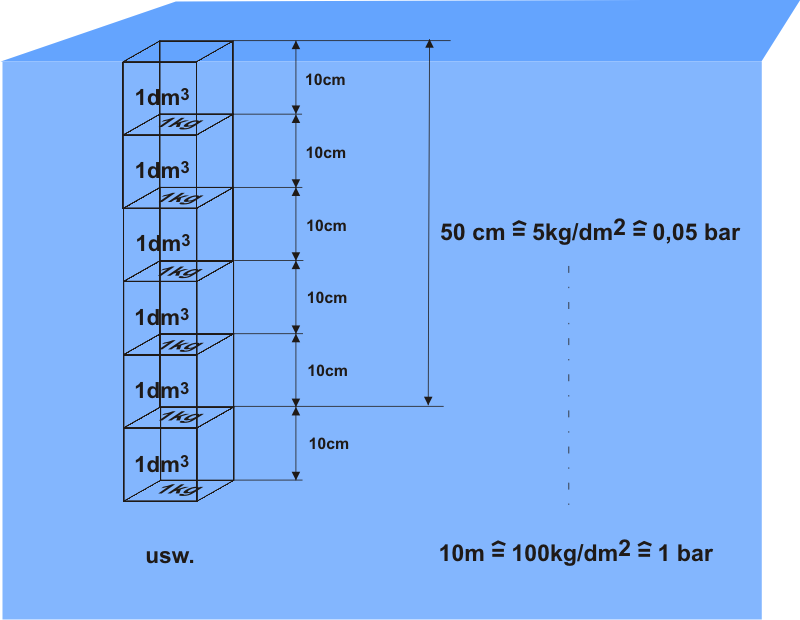
Nehmen wir nun an wir stapeln solche 1 dm3 grosse Würfel aus Wasser von der oberfläche aus nach unten. Jeder dieser einzelnen Würfel nimmt ein Gewicht von ca. 1 kg ein, denn 1 Liter Wasser hat ein Volumen von 1 dm3 und wiegt 1 kg. Ein Würfel übt demnach 1kg Druck auf 1 dm2 Fläche aus. Zwei gestapelte Würfel bereits 2 kg/dm2 und so weiter.
Bei 100 gestapelten Würfeln (dies entspricht einer Tiefe von 10 m) hätten wir sage und schreibe eine Belastung von 100 kg auf eine Fläche von 1 dm3. Das entspricht einem Druck von 1bar.
Nun ist aber so, dass bei der Belastung nicht nur die 1 dm3 zu betrachten sind, sondern die ganze Oberfläche des Tauchkörpers. Das heisst, wenn wir ein Tauchkörper mit einer Oberfläche von 10 dm2 auf die Tiefe von 10m sinken lassen, so wirkt auf diese Oberfläche rund 1 Tonne Gewicht! Eine Menge Gewicht, welches der Druckkörper aushalten muss.
Die Festigkeit eines Druckkörpers ist deshalb von zentraler Bedeutung beim Bau eines U-Boots. Die Materialstärke und insbesondere die Form sind wesentliche Faktoren. Runde oder kugelförmige Gebilde sind flachen Körpern vorzuziehen. Auch steife Körper sind besser als dehnbare, da weiche Boote je nach Tiefe und der damit verändernden Verdrängung eine Trimmung nach sich ziehen.
Innendruck
Statische U-Boote besitzen einen Tauchtank. Beim Füllen des Tanks wird die darin enthaltene Luft verdrängt. Die verdrängte Luft fliesst im Modell U-Boot meist in den Druckkörper und wird komprimiert. Damit der Tauchtank quasi bis zum letzten Tropfen gefüllt werden kann muss genügend Platz für die verdrängte Luft zur Verfügung stehen und der Druckkörper entsprechend stabil sein. Der Antrieb und die Mechanik für das Lenzen des Tauchtanks muss deshalb kräftig genug sein, um die Kompression durchführen zu können!
Bemerkung: Im Tauchgang wirkt der erhöhte Innendruck dem Aussendruck entgegen, was den Druckkörper in der Tiefe etwas stabilisiert. Grundsätzlich lässt sich so etwas tiefer tauchen. Dieser Aspekt sollte beim Bau aber völlig ausgeblendet werden. Der Vorteil und Bau von dünnwandigeren Druckkörpern auf Grund des Innendrucks ist marginal und zur Kalkulation dem Laien nicht zu empfehlen.
Antrieb
Bemerkung: Thema wird demnächst ergänzt.
Steuerung
Bemerkung: Thema wird demnächst ergänzt.
Ruder
Bemerkung: Thema wird demnächst ergänzt.
Sicherheit
Dem Aspekt Sicherheit sollte einen hohen Stellenwert eingeräumt werden. Zwar sind keine Menschleben in Gefahr, aber viele Stunden Arbeit und Kosten können innert Sekunden für immer vernichtet werden! Wichtige Sicherheitsfaktoren sind zum Beispiel:
- Überwachung des Ladezustands einer Batterie: Die Ladung einer Batterie muss ausreichen, um ein U-Boot noch sicher an die Oberfläche bringen zu können.
- Überwachung des Stromverbrauchs: Ein zu hoher Stromkonsum lässt auf einen Kurzschluss oder ähnliches schliessen.
- Innendrucküberwachung: Wenn der Innendruck beim Tauchgang zusammenfällt, ist dies ein Indikator für ein Leck!
- Feuchtigkeitsüberwachung: Zu hohe Feuchtigkeit lässt ebenfalls auf ein Leck schliessen.
- Überwachung der Empfangssignale oder der Verbindung zur Kommandoeinheit: Eine fehlende (Funk-) Verbindung zum U-Boot macht das U-Boot nicht mehr steuerbar.
In jedem dieser Störfälle ist es ratsam das U-Boot automatisch an die Oberfläche zu bringen.
Die Überwachung der Störzustände erfolgt am Besten über eine zentrale Mikroprozessor-Einheit im U-Boot. Mit einem Mikroprozessor lässt sich ganz einfach den Ladezustand einer Batterie oder die Funkverbindung überwachen. Durch den Einsatz entsprechender Sensoren (z.B. Druck- und Feuchtesensoren) lassen sich mit dem Mikroprozessor auch andere Faktoren absichern.
Material
Beliebte Materialien beim Modellbau sind Holz, Epoxidharz und Glasfaser, Styropor, Aluminium, PVC, Blech, Messing und vieles mehr. Nicht alle dieser Materialien sind für ein Modell U-Boot geeignet. In diesem Abschnitt sollen deshalb kurz die Einsatzgebiete sowie Vor- und Nachteile bestimmter Materialien erläutert werden.
Bei der Wahl des Materials sind folgende Faktoren zu überlegen:
- Gewicht
- Wasserfestigkeit
- Mechanische Beanspruchung
- Verarbeitbarkeit
Bemerkung: Thema wird demnächst ergänzt.
Literaturempfehlung
Ich möchte an dieser Stelle nicht länger in der Theorie verweilen und auf ein Buch verweisen, welches mir gute Dienste erwiesen hat:
U-Boot-Modellbau von Stephan Post ISBN 3-7883-2150-4
In diesem Buch vermittelt Stefan Post dem Leser auf anschauliche Weise den Bau von Modell U-Booten und befasst sich praxisnah zur Konstruktion und den Betrieb. Ein weltweit berühmter Anbieter für Modell U-Boote ist die Firma Alexander Engel.
Weiteres Wissen zu U-Booten und U-Bootmodellen finden Sie unter folgenden Links:

